
EtherCAT là một giao thức truyền thông Ethernet công nghiệp nổi bật được ứng dụng hầu hết trong các lĩnh vực công nghiệp. Bạn có thắc mắc tại sao EtherCAT lại khác biệt hơn so với giao thức Ethernet truyền thống hay không? Trong bài viết này, Mstar Corp sẽ giải thích cơ chế hoạt động của EtherCAT và so sánh nó với các ứng dụng truyền thông khác để bạn có cái nhìn tổng quan hơn.
EtherCAT là gì?
EtherCAT (Ethernet for Control Automation Technology) là một mạng mở Ethernet Master/Slave thời gian thực. EtherCAT cho phép thiết lập giới hạn hiệu suất theo thời gian thực, với khả năng xử lý 1000 I/O phân tán trong 30 µs hoặc 100 trục trong 100 µs khi sử dụng cáp sợi quang hoặc cáp xoắn.

EtherCAT sử dụng giao thức Ethernet để truyền dữ liệu nhanh chóng và đồng bộ giữa các thiết bị trong hệ thống. Một trong những đặc điểm nổi bật của EtherCAT là khả năng truyền dữ liệu qua nhiều thiết bị trong một chuỗi liên kết (daisy-chain) duy nhất, từ đó giảm đáng kể chi phí cáp và thời gian cài đặt.
Mạng EtherCAT được thiết kế để hỗ trợ các ứng dụng kiểm soát thời gian thực với độ trễ rất thấp và khả năng đồng bộ cao. Giao thức này cho phép các thiết bị kết nối, đồng bộ hóa dữ liệu và hoạt động hiệu quả trong các hệ thống tự động hóa phức tạp.t
Hiện nay, EtherCAT đã trở thành một công nghệ phổ biến trong lĩnh vực tự động hóa công nghiệp và được sử dụng trong các ứng dụng như điều khiển động cơ, hệ thống điều khiển máy móc, robot công nghiệp,…
Sự ra đời và phát triển của EtherCAT
Beckhoff Automation là cha đẻ của giao thức truyền thông công nghiệp EtherCAT. Đây là một thương hiệu chuyên sản xuất các dòng PLC (Bộ điều khiển logic khả trình) cho các hệ thống điều khiển thời gian thực và tự động hóa công nghiệp.

Vào năm 2003, EtherCAT ra đời dựa trên phiên bản Fieldbus có tên là LightBus vào cuối những năm 1980. Năm 2004, Beckhoff Automation đã trao quyền cho ETG (EtherCAT Technology Group) – tổ chức chịu trách nhiệm quảng bá tiêu chuẩn này. Hiện nay, EtherCAT được tiêu chuẩn hóa theo IEC 61158.
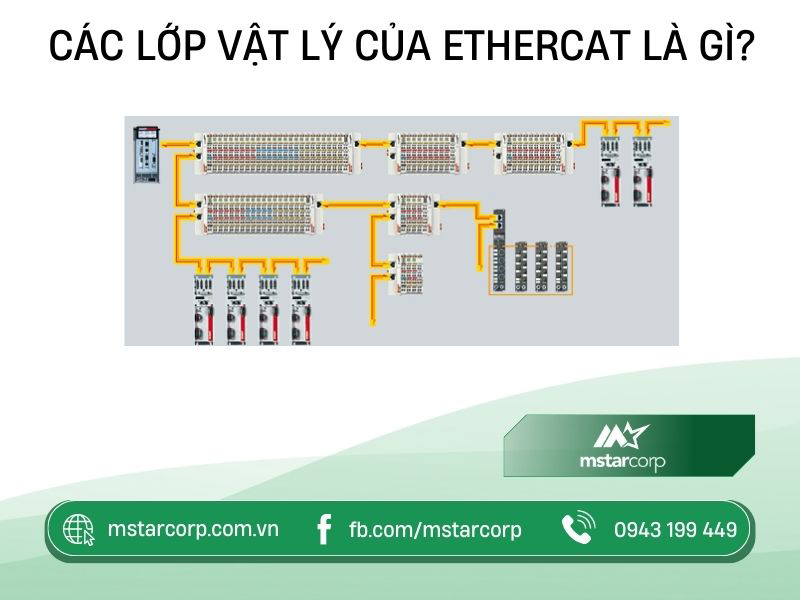
EtherCAT có các lớp vật lý nào?
EtherCAT sử dụng cùng một lớp liên kết vật lý và dữ liệu của Ethernet, được mô tả như sau:
- Lớp vật lý là phần cứng truyền tải dữ liệu qua mạng một cách vật lý, đóng vai trò như cấp điện cốt lõi, tức là cấp độ “cơ học” của mạng.
- Lớp liên kết dữ liệu là nơi dữ liệu được mã hóa thành các gói. EtherCAT sử dụng lớp này của Ethernet. Tuy nhiên, các lớp khác mà người dùng Ethernet thường biết đến như lớp Mạng (IP) và lớp Truyền tải (TCP và UDP) bị EtherCAT bỏ qua hoàn toàn vì nó tập trung vào thời gian chu kỳ.
Nhờ các đặc điểm này và các khía cạnh khác của giao thức, EtherCAT có thể giảm thời gian chu kỳ của Ethernet từ 10 ms xuống nhiều bậc, mang lại tốc độ dữ liệu hiệu quả là 100 Mbps.
Vì sao EtherCAT lại quan trọng?
EtherCAT đóng vai trò quan trọng trong đa số ngành công nghiệp bởi những ưu điểm vượt trội sau:
- Hiệu suất cao: EtherCAT là giao thức truyền thông công nghiệp nhanh nhất với tốc độ 200 Mbps (chế độ song công Duplex = 100 Mbps x 2).
- Độ chính xác cao: EtherCAT đảm bảo độ trễ chỉ 1 ns, giúp duy trì độ chính xác cao về yếu tố thời gian.
- Cấu trúc liên kết linh hoạt: Mô hình EtherCAT có thể được thiết lập theo nhiều cấu trúc khác nhau như vòng, thẳng, cây, hoặc sao mà không bị giới hạn.
- Khả năng mở rộng mạng: EtherCAT có khả năng mở rộng mạng gần như vô hạn.
- Thao tác dễ dàng: EtherCAT Master tự động gán địa chỉ node và gửi thông báo đồng bộ thời gian cho từng thiết bị trong mạng.
- Cấu hình đơn giản: EtherCAT không sử dụng địa chỉ IP hoặc địa chỉ MAC để hoạt động, giúp đơn giản hóa việc cấu hình.
- Giá cả phải chăng: Chi phí triển khai EtherCAT tương tự hoặc thấp hơn so với mạng Fieldbus thông thường.

Nguyên tắc hoạt động của EtherCAT
Nguyên tắc hoạt động của công nghệ EtherCAT là “đọc truyền qua,” trong đó các thông điệp được dành cho nhiều nút thay vì chỉ một nút duy nhất. Các thông điệp sẽ truyền lần lượt qua từng nút trong chuỗi, và mỗi nút sẽ xử lý dữ liệu đầu vào và chèn dữ liệu đầu ra vào thông báo trước khi truyền tới nút tiếp theo.
EtherCAT Master phát hành một thông báo dữ liệu duy nhất cho tất cả các nút. Thông điệp này sẽ truyền qua mạng và quay trở lại Master, đảm bảo mọi nút trong mạng đều nhận được dữ liệu đầu vào mới từ Master và trả lại dữ liệu đầu ra mới cho Master.
Khi không có các tải nhỏ và thông báo được nhắm mục tiêu cụ thể cho từng nút, mạng EtherCAT có thể đạt được mức sử dụng băng thông tối đa. Điều này có thể được so sánh với một tuyến đường sắt, nơi mỗi ga có thể dỡ và sắp xếp lại các toa tàu khi chúng di chuyển qua.

EtherCAT và Ethernet có gì khác?
Bảng phân biệt EtherCAT và Ethernet dựa vào các đặc điểm kỹ thuật:
| Đặc điểm | Ethernet | EtherCAT |
| Lớp liên kết vật lý và dữ liệu | Có | Có |
| Chuẩn quốc tế | IEEE 802.3 | IEC 61158 |
| Khả năng xác định thời gian | Không | Có |
| Hoạt động theo mô hình Master / Slave | Không | Có |
| Hỗ trợ cấu trúc liên kết dựa trên vòng | Không yêu cầu | Có |
| Tối ưu hóa cho kiểm soát thời gian thực | Không | Có |
| Tối ưu hóa để tránh xung đột dữ liệu | Không | Có |
Trong mô hình Ethernet, nhiều thiết bị được kết nối ngang hàng, nghĩa là mọi thiết bị đều có thể gửi và nhận dữ liệu qua mạng. Tốc độ truyền tải trong mô hình Ethernet khá cao, nhưng dễ bị quá tải dữ liệu khi có nhiều thiết bị cùng gửi hoặc yêu cầu lượng lớn dữ liệu cùng lúc.
Ngược lại, EtherCAT lại có cách thức hoạt động hoàn toàn khác:
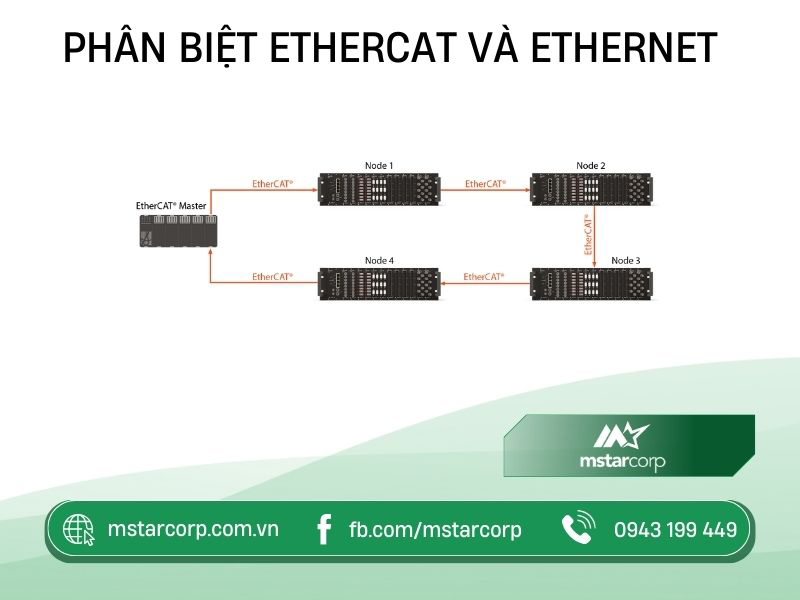
- Trong mạng EtherCAT, chỉ có một thiết bị duy nhất được phép truyền dữ liệu, đó là EtherCAT Master. Thiết bị này gửi một chuỗi dữ liệu qua bus, loại bỏ các xung đột dữ liệu của hệ thống Ethernet để tối ưu hóa tốc độ truyền tải.
- Frame EtherCAT được nhúng trong Frame Ethernet tiêu chuẩn và được xác định trong trường EtherType với giá trị 0x88A4. Thiết bị EtherCAT Master là thiết bị duy nhất trong phân đoạn EtherCAT có quyền gửi tin nhắn tới các EtherCAT Slave. Các thiết bị cấp Slave có thể thêm dữ liệu vào Frame và chuyển tiếp nó, nhưng không thể tự tạo tin nhắn mới.
- Các thiết bị EtherCAT Slave sẽ xử lý dữ liệu và bổ sung bất kỳ dữ liệu nào mà Master yêu cầu. Sau đó, Frame dữ liệu sẽ được gửi tới node tiếp theo trong vòng liên kết. Các node tiếp theo sẽ thực hiện chính xác điều tương tự: nhận dữ liệu cần thiết, bổ sung dữ liệu yêu cầu vào Frame EtherCAT và chuyển tiếp tới các node tiếp theo.
- Tốc độ truyền tải của EtherCAT cao hơn so với Ethernet vì trong mạng liên kết, chỉ có một thiết bị chủ quản được phép gửi dữ liệu. EtherCAT cũng tích hợp kỹ thuật xử lý nhanh chóng, trong đó thiết bị node có thể đọc tiêu đề và gửi dữ liệu đồng thời, tiết kiệm thời gian và nâng cao hiệu quả truyền tải.
- EtherCAT cho phép dữ liệu đến và đi từ nhiều thiết bị trong mạng kết hợp thành các khung đơn, tối ưu hóa tốc độ truyền tải. Nếu một node thiết bị không đủ khả năng xử lý dữ liệu, tốc độ bus có thể được điều chỉnh trực tiếp bởi EtherCAT Master, đảm bảo rằng không có dữ liệu nào bị mất.
Yếu tố đồng hồ phân tán
Một trong những điểm khác biệt chính của EtherCAT so với Ethernet là đồng hồ phân tán. Mỗi node thiết bị đánh dấu thời gian nhận và gửi dữ liệu khi truyền đến node tiếp theo.
Điều này cho phép EtherCAT Master xác định độ trễ của từng node với độ chính xác cao hơn nhiều so với Ethernet khi nhận dữ liệu tổng hợp. Đồng hồ phân tán tích hợp của EtherCAT cung cấp hiệu suất “jitter” chỉ 1 µs, tương đương với tiêu chuẩn IEEE 1588 PTP mà không cần thêm phần cứng.
Khả năng chịu lỗi của EtherCAT
EtherCAT có khả năng chịu lỗi tốt với các đặc điểm sau:
- Mạng EtherCAT có thể được cấu hình theo nhiều dạng như liên kết cây, vòng, hoặc hình sao.
- Nếu đầu ra của node cuối không kết nối với thiết bị chủ, dữ liệu sẽ tự động được chuyển theo hướng khác nhờ giao thức EtherCAT. Cấu trúc mạng EtherCAT rất linh hoạt và có khả năng chịu lỗi cao. Hệ thống không sử dụng thiết bị chuyển mạch (Switch), và dây cáp kết nối có thể dài đến 100 mét (328 ft) giữa các node, hỗ trợ triển khai cho các hệ thống nhà máy và xí nghiệp quy mô vừa đến lớn.
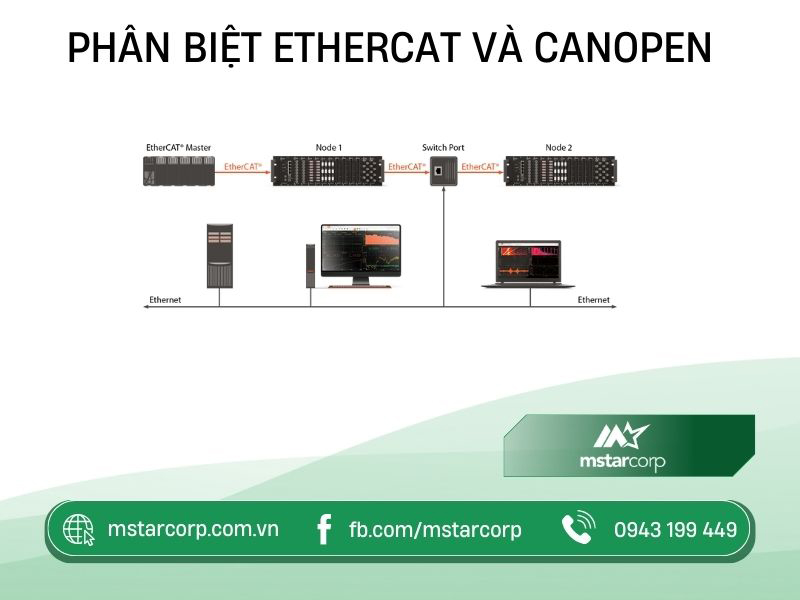
So sánh EtherCAT và CANopen
CANopen là một giao thức cấp cao dựa trên bus CAN, bao gồm các thông số kỹ thuật cho thiết bị trên bus. Trong khi EtherCAT sử dụng hai lớp thấp nhất (dữ liệu và vật lý) của giao thức Ethernet, CANopen sử dụng hai lớp thấp nhất của mô hình OSI CAN.
Một trong những lợi thế chính của CANopen là khả năng tận dụng phần cứng đã được chứng minh bởi nhiều nhà sản xuất. CAN được phát triển để giảm số lượng dây điện trong ô tô và qua nhiều thập kỷ, nó đã được áp dụng rộng rãi trong các ngành công nghiệp khác nhau như công nghiệp, hàng không vũ trụ và năng lượng.
Ngoài ra, CANopen cũng cung cấp mức độ liên kết cao, giúp các kỹ sư dễ dàng tích hợp thiết bị sử dụng CAN làm lớp giao tiếp phần cứng. Giao thức này xử lý nhiều tác vụ cấp thấp, đơn giản hóa và tăng tốc độ truyền dữ liệu. Các vấn đề phần cứng đặc thù của CAN như lọc chấp nhận và định thời bit được quản lý bởi CANopen. Giao thức này cũng cung cấp các đối tượng giao tiếp (COB) cho các hệ thống nhạy với thời gian và các tác vụ quản lý phần cứng khác.
Trong khi đó, EtherCAT hoạt động theo kiến trúc master/slave (một master, nhiều slave). Master gán địa chỉ cho từng slave, kiểm soát tốc độ truyền của mạng và thực hiện đồng bộ hóa thời gian cho tất cả các thiết bị, có thể lặp lại khi cần. Chỉ có thiết bị master được phép truyền thông điệp, trong khi các slave phải phản ứng, chèn phản hồi có dấu thời gian và gửi lại cho master.
Ngược lại EtherCAT, mạng CANopen có thể có nhiều hơn một master. Tuy nhiên, mỗi thiết bị phải có địa chỉ duy nhất và tất cả thiết bị phải hoạt động ở cùng một tốc độ bit, với tốc độ bit tối đa đề xuất là 1000 kbps.
Hệ thống CANopen có thể chứa tối đa 127 thiết bị, bao gồm ít nhất một master. Trong khi đó, một phân đoạn EtherCAT có thể chứa tới 65.535 thiết bị, với khoảng cách tối đa giữa các thiết bị là 100m (328 feet).
EtherCAT cung cấp tính xác định cao, đạt jitter tốt hơn 1µs ở tốc độ 100 Mbps. Trong khi đó, CANopen SYNC bị giới hạn ở độ dài khung hình và có thể gặp jitter lên đến 130μs ở tốc độ 1 Mbps.
Dưới đây là bảng so sánh cấp cao nhất giữa EtherCAT và CANopen:
| Tiêu chí | EtherCAT | CANopen |
| Cơ sở phần cứng | Dựa trên Ethernet | Dựa trên CANbus |
| Tốc độ truyền dữ liệu | 100 Mb/s | Tối đa 1 Mbps |
| Chế độ truyền tín hiệu | Song công | Bán song công |
| Độ chính xác thời gian | Tốt nhất 1 ns | Thường 100-200 ns |
| Số lượng thiết bị tối đa | 65.536 | 127 thiết bị (bao gồm 0 được đặt trước) |
| Khoảng cách kết nối tối đa | 100 m (328 ft.) | Tùy thuộc vào tốc độ bus: |
| 1,5 m ở 1 Mbps | ||
| 2,5 m ở 800 kbps | ||
| 5,5 m ở 500 kbps | ||
| 11 m ở 250 kbps | ||
| Cổng giao tiếp bổ sung | USB | RS232 |
| Mô hình Master / Slave | Một Master với nhiều Slave | Nhiều Master có thể kết hợp với nhiều Slave |
| Gán địa chỉ Slave tự động | Có | Không |
| Đồng bộ thời gian thiết bị | Được thực hiện tự động bởi Master | Không tự động |
Ngoài ra, tiêu chuẩn CANopen được quản lý bởi CAN in Automation (CiA) International Users and Manufacturers Group, trong khi tiêu chuẩn EtherCAT được duy trì bởi EtherCAT Technology Group và tuân thủ theo IEC 61158.
Cả EtherCAT và CANopen đều được ứng dụng rộng rãi trong các lĩnh vực như:
- Ô tô
- Vận tải và đường sắt
- Chăm sóc sức khỏe
- Ngành công nghiệp
- Tự động hóa nhà máy
- Nông nghiệp
- Hàng không vũ trụ
Tóm lại, cả hai giao thức đều rất hiện đại và phục vụ tốt cho chức năng dẫn truyền. Tuy nhiên, CANopen là sự lựa chọn lý tưởng cho các ứng dụng phân tán với tốc độ thấp và trung bình còn EtherCAT với khả năng xử lý tốc độ cao, đồng bộ hóa thời gian chính xác và khả năng kết hợp điều khiển sẽ là sự lựa chọn ưu việt cho các ứng dụng yêu cầu độ chính xác và tốc độ cao hơn.
EtherCAT ứng dụng thực tế trong các lĩnh vực nào?
Hiện nay, giao thức truyền thông EtherCAT đang được ứng dụng rộng rãi trong nhiều lĩnh vực và quy mô sản xuất công nghiệp, bao gồm:
- Hệ thống tự động hóa công nghiệp
- Giao thức mạng PLC
- Điều khiển động cơ Servo
- Hệ thống thu thập dữ liệu
- Sản xuất tự động bằng Robot
- Sản xuất nguyên vật liệu xây dựng
- Hệ thống máy in
- Sản xuất chất bán dẫn
- Nhà máy luyện kim, sản xuất bột giấy và giấy
- Nhà máy điện
- Tua bin gió
- Dây chuyền sản xuất nông nghiệp

Câu hỏi thường gặp
EtherCAT master là gì?
Mỗi phân đoạn mạng EtherCAT cần một thiết bị EtherCAT master – đây được hiểu là thiết bị duy nhất có quyền gửi tin nhắn trên mạng. Master chịu trách nhiệm quản lý mạng, đồng bộ hóa thời gian cho tất cả các slave và gán địa chỉ cho từng slave. Nó yêu cầu dữ liệu từ các slave và nhận các thông báo đã được sửa đổi chứa dữ liệu yêu cầu.
EtherCAT master gửi dữ liệu qua lớp MAC (Media Access Controller) ở lớp 2 (lớp dữ liệu) trong mô hình Ethernet OSI chuẩn hóa. Không cần bộ xử lý giao tiếp bổ sung, cho phép EtherCAT hoạt động trên bất kỳ thiết bị nào có cổng Ethernet.
EtherCAT hỗ trợ khoảng cách tối đa bao nhiêu giữa các thiết bị?
Liên kết phân đoạn của EtherCAT có thể là một đường, cây, vòng, hình ngôi sao,… hay thậm chí là sự kết hợp của những loại này. Do vậy, khoảng cách tối đa giữa các thiết bị EtherCAT sẽ phụ thuộc vào liên kết phân đoạn của EtherCAT bạn đang sử dụng thuộc loại nào.
Thông thường, EtherCAT hỗ trợ tối đa 65.536 thiết bị duy nhất trên một phân đoạn, cho phép kết nối một số lượng rất lớn thiết bị đồng thời. Tuy nhiên, tính khả thi của một hệ thống với số lượng thiết bị như vậy có thể cần xem xét kỹ lưỡng.
Với cáp Ethernet tiêu chuẩn (100BASE-TX), khoảng cách tối đa giữa hai thiết bị trong phân đoạn là 100m (328 feet). Nếu sử dụng cáp sợi quang (100BASE-FX), khoảng cách này có thể mở rộng lên tới 2 km (1,25 dặm).
Trên thực tế, hầu hết các hệ thống EtherCAT thường được triển khai trong phạm vi một tòa nhà, nhà máy, hoặc khu vực cụ thể trong nhà máy.
Ethernet nào tốt nhất cho các ứng dụng thời gian thực?
Được giới thiệu vào năm 2003, Profinet cũng được đánh giá một tiêu chuẩn kỹ thuật tốt dành cho giao tiếp truyền thông công nghiệp. Hiện nay, EtherCAT và Profinet không phải là những giao thức Ethernet công nghiệp (IE) duy nhất được sử dụng. Tuy nhiên, chúng lại là hai cái tên được nhắc đến nhiều nhất trong ứng dụng thời gian thực so với Ethernet/IP, Powerlink, SERCOS III, Modbus TCP hay là CC-Link IE.
Dưới đây là bảng so sánh giữa EtherCAT và Profinet IO (IRT – Cấp cao nhất của Profinet):
| Tính năng / Tham số | EtherCAT | Profinet IO (IRT) |
| Số lượng thiết bị tối đa trên mạng | 65.536 | 64 (bao gồm cả master) |
| Các cấu hình mạng hỗ trợ | Dòng, vòng, cây, ngôi sao và các kết hợp | Dòng, cây, ngôi sao |
| Khả năng phục hồi mạng tự động | Có | Không |
| Yêu cầu sử dụng switch mạng | Không; không cần switch hay bộ trung tâm | Có; cần switch quản lý mạng |
| Tính năng đồng hồ phân tán | Có | Không |
| Tốc độ truyền dữ liệu | 2 x 100 Mbps (song công) | 2 x 100 Mbps (song công) |
| Thời gian chu kỳ truyền | 100 µs | Dưới 1 mili giây |
| Độ chính xác trong đồng bộ hóa | Khoảng 1 ns | Dưới 1 µs |
| Mức jitter | Dưới 1 µs | Dưới 1 µs |
| Khả năng bị ảnh hưởng bởi tắc nghẽn | Không | Có; cần người dùng quản lý tải mạng |
| Tự động định địa chỉ cho thiết bị slave | Có; master tự động thực hiện, kể cả khi thêm thiết bị mới | Không; yêu cầu người tích hợp đảm bảo địa chỉ duy nhất cho từng thiết bị |
| Chi phí triển khai | Thường thấp hơn so với nhiều hệ thống Fieldbus | Thường cao hơn do chi phí tích hợp và phần mềm |
- Mặc dù có thể kết nối nhiều nút hơn, Siemens (nhà sản xuất chính của các thiết bị Profinet) khuyến nghị tối đa 64 nút cho thiết bị Profinet.
- Khác với EtherCAT, Profinet không có cơ chế tích hợp sẵn để kiểm soát lưu lượng truy cập, điều này có thể dẫn đến tình trạng quá tải mạng và làm gián đoạn hoạt động. Người dùng cần chủ động quản lý tải mạng để ngăn ngừa vấn đề này.
Tóm lại, theo tất cả các thông số kỹ thuật trên, EtherCAT được đánh giá là một giải pháp Ethernet công nghiệp ưu việt. Nó nhanh hơn, dễ triển khai hơn, linh hoạt hơn và có chi phí cấu hình thấp hơn so với các hệ thống khác. Bên cạnh đó, EtherCAT là một tiêu chuẩn hoàn toàn mở không yêu cầu phí cấp phép (giao thức mở, không cần cấp quyền).
Kết luận
Có thể thấy, so với giao thức Ethernet truyền thống, EtherCAT cung cấp hiệu suất vượt trội và khả năng mở rộng linh hoạt, đáp ứng tốt các yêu cầu khắt khe trong các ứng dụng công nghiệp hiện đại. Những ưu điểm này giúp EtherCAT duy trì vị thế của mình như một giải pháp truyền thông công nghiệp ưu việt trong thời đại 4.0.
